Беспилотный автомобиль, также известный как робомобиль, — это транспортное средство, оснащенное системой автоматического управления, которая позволяет ему безопасно передвигаться без участия водителя.
Беспилотные автомобили уже стали частью нашей реальности. Время, когда водительские права станут ненужными, а профессия водителя исчезнет, подобно профессии извозчика в начале XIX века, приближается.
Как работает беспилотный автомобиль

Беспилотные автомобили могут передвигаться без участия водителя благодаря специальному программному обеспечению (ПО) и датчикам.
Программное обеспечение контролирует работу всех систем автомобиля: поворот руля, переключение передач, работу газа и тормоза. Датчики собирают информацию об окружающей обстановке, на основе которой автомобиль принимает решения о своих действиях.
Локализация — это определение местоположения автомобиля. Для этого требуется высокая точность, которую не могут обеспечить глобальные системы позиционирования, например, GPS. Поэтому производители чаще всего используют данные с датчиков, которые сравниваются с высокоточными картами, уже заложенными в систему.
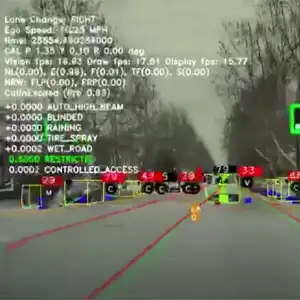
Распознавание — это первый этап работы беспилотного автомобиля. Он должен идентифицировать объекты вокруг: увидеть и классифицировать других участников движения, определить их размер, скорость и направление движения.
После этого наступает этап предсказания. Алгоритмы прогнозируют, как будут вести себя другие участники дорожного движения. Например, куда поедет тот или иной автомобиль.
Затем идёт этап планирования. Алгоритмы планируют, как беспилотник будет взаимодействовать с другими участниками дорожного движения. Это самый сложный этап на данный момент, потому что действия живых водителей часто сложно предсказать. Исходя из предыдущих задач, алгоритмы «определяют» свои действия и отдают команды системам управления. Всё это должно происходить за миллисекунды.
Беспилотные автомобили оснащены различными датчиками, такими как камеры, радары и лидары
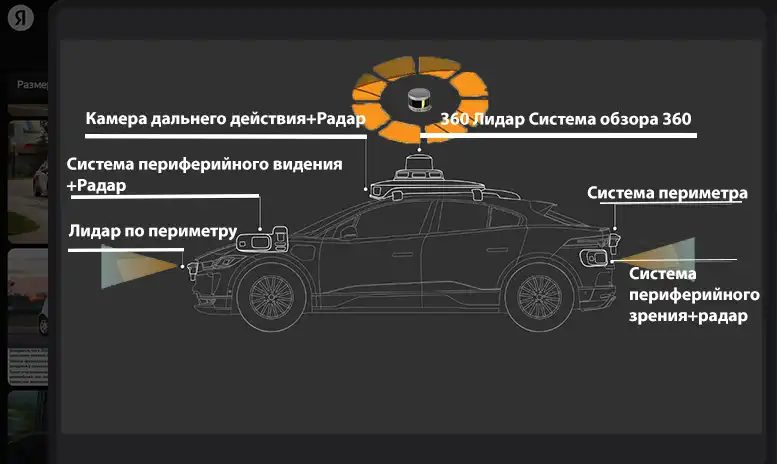
Каждый из этих сенсоров по отдельности не может точно определить расстояние до объектов, их скорость и форму. Однако комбинация этих приборов позволяет устранить индивидуальные недостатки и усилить преимущества.
Радар обнаруживает объект и определяет его скорость на расстоянии до 300 метров. Он находит объекты с помощью радиоволн и фиксирует их скорость.
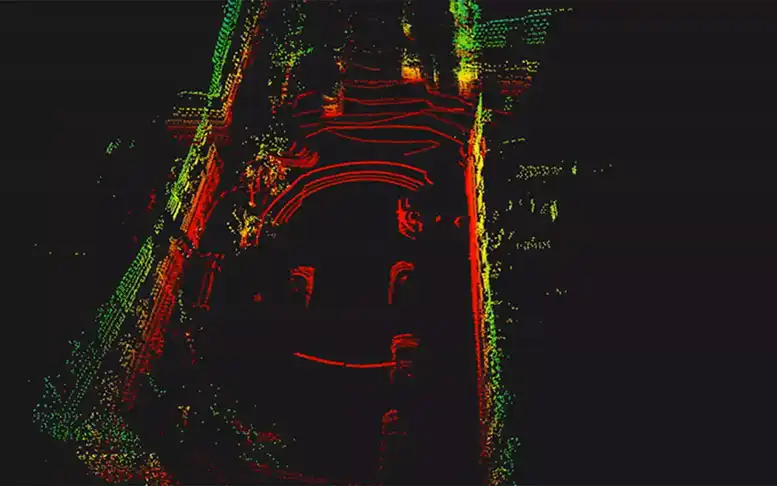
Лидар сканирует пространство с помощью лазерных лучей, которые отражаются от объектов и создают трёхмерную картину окружающей среды. Он определяет расстояние до объектов (и их форму), являясь, пожалуй, ключевым элементом базовой концепции.
Однако у лидара есть и минусы: он не различает цветов, не может классифицировать сложные по форме объекты, а также изображения на знаках, если данных о них нет в загруженной карте.
Камера позволяет детально рассмотреть объекты, определить их тип, а также заметить другие автомобили, дорожные знаки или сигналы светофора.
Сенсоры собирают информацию об окружающем мире и передают её в компонент системы управления, который на основе этой информации, данных карт и сведений о местоположении планирует дальнейшие действия. Затем компонент системы управления направляет автомобиль по заданной траектории.
Байесовский метод одновременной локализации и построения карт (SLAM)
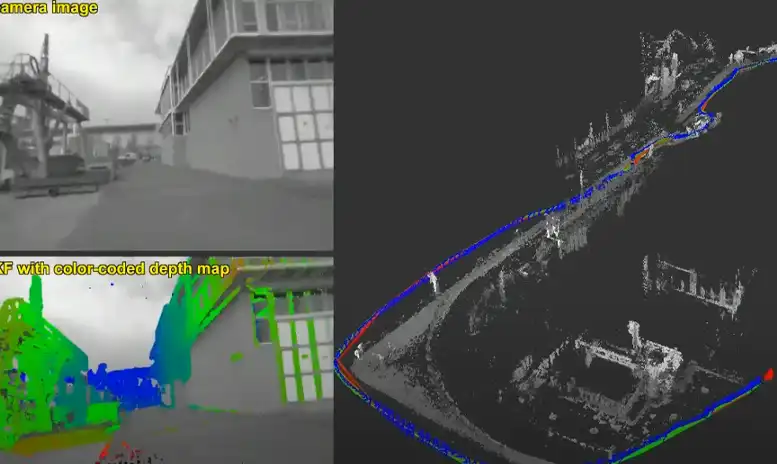
В современных беспилотных автомобилях используются алгоритмы, основанные на байесовском методе одновременной локализации и построения карт (SLAM). Этот метод позволяет комбинировать данные, получаемые от датчиков автомобиля в режиме реального времени, с данными карт, полученными заранее.
SLAM и метод обнаружения и отслеживания движущихся объектов (DATMO) разработаны и применяются в беспилотных автомобилях компании Google, которая является дочерней компанией Google Waymo. В прошлом Google судилась с Uber по поводу обвинений в краже технологий, но с 2017 года компания опубликовала библиотеку SLAM в открытом доступе для свободного использования любой сторонней компанией.
Некоторые компании дополняют свои концепции системы. Например, один из лидеров в разработке беспилотных автомобилей Waymo добавляет к обычному набору сенсоров микрофоны. Они предназначены для распознавания сирен полиции и служб экстренного реагирования.
Такие алгоритмы, появившиеся в последние несколько лет, можно пересчитать по пальцам – это ORB SLAM, LSD (Large Scale Direct) SLAM (и его предшественник SVO (Semi-direct Visual Odometry)), PTAM (Parallel Tracking And Mapping). Еще меньше алгоритмов, строящих более-менее плотные (semi-dense) карты окружения. Из наиболее продвинутых алгоритмов такие карты выдает лишь LSD SLAM:
Беспилотники в основном для ориентации в пространстве используют высокоточные 3D-карты

Распространено мнение, что для беспилотных автомобилей критически важно наличие данных со спутников системы глобального позиционирования (GPS). Однако это не так.
Транспорт без водителя должен уметь передвигаться в любых условиях и не зависеть от вспомогательных систем. GPS не всегда предоставляет точные данные, особенно в условиях городской застройки, где погрешность может достигать нескольких десятков метров.
Большинство производителей используют для ориентации в пространстве высокоточные 3D-карты. Эти карты уже загружены в автомобиль и содержат информацию о дорожной разметке, светофорах и знаках. Данные с сенсоров автомобиля сопоставляются с этими картами, что позволяет точно определить местоположение и организацию движения в этом месте. Даже если разметка стёрта или скрыта под снегом, автомобиль сможет ориентироваться в пространстве.
Уровень автономности и безопасности автомобиля

Классификация уровней автоматизации автомобилей была разработана Сообществом автомобильных инженеров (SAE). Она включает в себя шесть уровней:
Уровень 0: никакой автоматизации, водитель выполняет всю работу.
Уровень 1: «помощь водителю». Водитель и система совместно управляют автомобилем. Например, система может регулировать мощность двигателя, чтобы поддерживать заданную скорость (круиз-контроль), или управлять тормозами, чтобы сохранять дистанцию между автомобилями (адаптивный круиз-контроль). Ещё один пример — автоматическая парковка, когда водитель задаёт скорость, а руление выполняется автоматически.
Уровень 2: «частичная автоматизация». Система полностью управляет автомобилем, осуществляя ускорение, торможение и руление. Водитель следит за процессом и готов вмешаться, если система не сможет правильно отреагировать. Несмотря на название «hands off» (без рук), такие системы часто требуют от водителя держать руки на руле как подтверждение готовности вмешаться.
Уровень 3: «условная автоматизация». От водителя не требуется немедленной реакции, он может, например, писать сообщения или смотреть фильм. Система сама реагирует на ситуации, требующие немедленных действий, таких как экстренное торможение. От водителя требуется готовность вмешаться в течение ограниченного времени, определённого производителем.
Уровень 4: «широкая автоматизация». Отличается от уровня 3 тем, что от водителя не требуется постоянного внимания. Например, он может лечь спать или покинуть место водителя. Полностью автоматическое вождение осуществляется лишь в некоторых пространственных областях (геозонах) или в некоторых ситуациях, например, в пробках. Вне таких мест система способна прекратить вождение и припарковать машину, если водитель не взял управление на себя.
Уровень 5: «полная автоматизация». Никакого человеческого вмешательства не требуется.
Сертификация беспилотных автомобилей
Сертификация беспилотных автомобилей необходима на этапе массового внедрения искусственного интеллекта. Однако в процессе тестирования она может замедлить развитие технологии.
Процесс сертификации беспилотных транспортных средств (БПТС) пока не отработан, что является препятствием для развития отрасли. Создание такой техники обходится дорого, поэтому большинство существующих образцов являются опытными.
Разработка БПТС, способных двигаться в автономном режиме в условиях городской инфраструктуры, зимой и в разное время суток, соблюдая правила дорожного движения, при отсутствии дорожной разметки, неразличимости дорожного полотна, наличии дорожного трафика и помех движению, на уровне среднестатистического водителя, является сложной задачей.
«Беспилотник должен собрать большое количество данных, и эти данные должны собираться не только на полигоне или в одном конкретном месте, а по всему городу — везде, где есть свободное движение. Чем больше беспилотных автомобилей, тем больше данных они соберут, тем безопаснее будет технология. Это похоже на то, как человек учится водить: нельзя научиться, если не выезжать на дорогу».
 Искусственный интеллект - ИИ нейросеть или языковая модель
Искусственный интеллект - ИИ нейросеть или языковая модель Беспилотные автомобили уже стали частью нашей реальности
Беспилотные автомобили уже стали частью нашей реальности Выборы в Европейский парламент - 27 стран выбрали 720 депутатов
Выборы в Европейский парламент - 27 стран выбрали 720 депутатов  Беспилотные летательные аппараты - БПЛА (БЛА)
Беспилотные летательные аппараты - БПЛА (БЛА) VTOL - аппараты вертикального взлета и посадки
VTOL - аппараты вертикального взлета и посадки Космический телескоп «Джеймс Уэбб» грандиозный проект в астрономии
Космический телескоп «Джеймс Уэбб» грандиозный проект в астрономии Международный суд запросил ордера на арест премьера Израиля и лидеров ХАМАС
Международный суд запросил ордера на арест премьера Израиля и лидеров ХАМАС Президент Ирана Эбрахим Раиси погиб при крушении вертолета
Президент Ирана Эбрахим Раиси погиб при крушении вертолета Грузинский закон об иноагентах в чем суть противостояния сторон
Грузинский закон об иноагентах в чем суть противостояния сторон Поэт-пенсионер пять раз выстрелил в премьера Словакии Роберт Фицо
Поэт-пенсионер пять раз выстрелил в премьера Словакии Роберт Фицо